

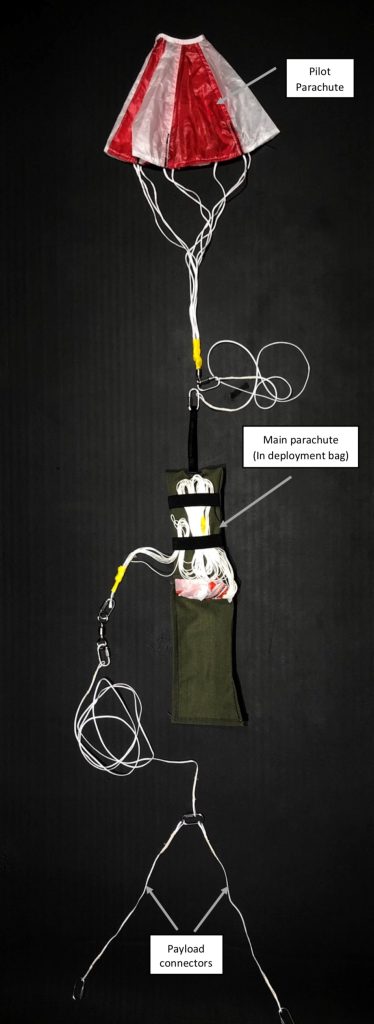
Pilot
The original design of the parachute system used ballistic deployment. This meant the system would use springs, CO2, or pyrotechnics to force the chute from the tube it was stored in. The main advantage of a ballistic parachute system is that the significant speed of the parachute after launch, decreases deployment time of the parachute.
Over the past several months, we have tested spring and CO2 powered systems, both of which had significant problems. A pyrotechnics system was considered, but never tested due to regulatory issues. This led us to do more research, that quickly reveled none of the previously mentioned parachute systems were feasible. With more searching, we were able to find a possible alternative for parachute deployment; a pilot parachute.
Pilot parachutes are small auxiliary chutes that are deployed before the main parachute and are used to pull it from the tube and deploy it. They are used in many parachute systems such as a skydiver’s and the Apollo moon missions.

While our original system did use pilot parachutes, they were deployed simultaneously with the main chutes and were only used to help the main chutes inflate. Due to the small size of these semi-pilots, and their proximity to the main chutes, all four chutes still had to be launched.
The new design we plan to test will use a pilot chute that is deployed first and then pulls the main chute from its tube. The major advantage of this system is that it removes the need for the main chute to be launched ballistically. While the pilot parachute will still need to be launched, its small size allows us to use a low power spring which solves many of the problems we encountered with the Gen 4-S that were caused by it’s higher power springs.
Another change we made is to the number of chutes we will use. In our previous system, we used two 0.9 m (36 in) main parachutes and two 20 cm (8 in) semi-pilots. This system was designed with redundancy in mind. However, this approach increased the risk of tangling when all 4 chutes were deployed. Therefore, when desiging the new system, we decided the increased tangling risk was greater than the benefits of redundancy and chose to use one main chute and one pilot chute. To support this change, the main chute’s size was increased to 1.2 m (48in) and the pilot chute to 0.3 m (12 in). We also packed the main parachute into a deployment bag to provide greater control of the parachute’s unfurling and increase the system’s reliability.
After the new parachutes arrived, we started working on the pilot chute launcher. We reused a Gen 0-S spring and other parts to make and test the Gen 0-P (shown below).
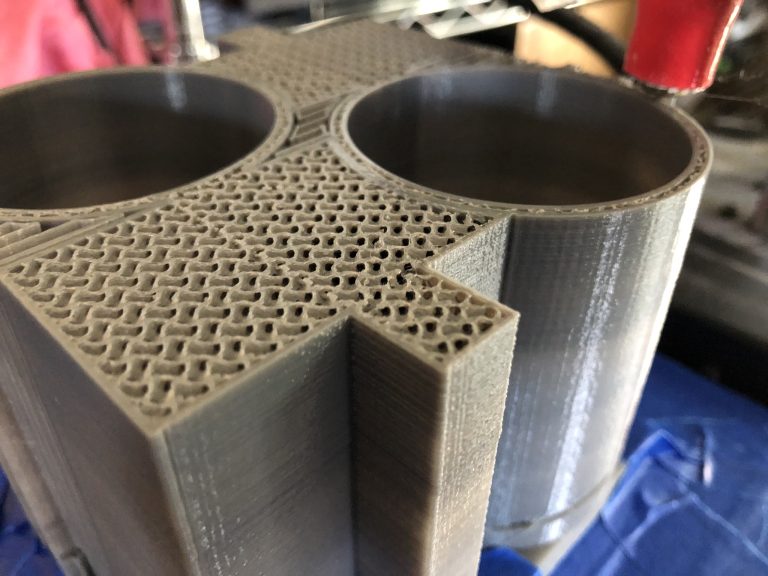
This test proved that the spring was strong enough to launch the pilot chute, but not so strong that it prevented the release mechanism from working. We then printed, assembled and tested the Gen 1-P (shown below).
The Gen 1-P performed as expected, and with this success, the parachute system is once again almost ready to fly.




I admire your persistence in remedying this problem. Good work.