Impact
After the results of our last tests, we were feeling confident that the PSCC (Parachute System Control Computer) was approaching a functional sate. During our latest in a series of tests, all aspects of the PSCC code worked as expected, with the only issue being a recurring discrepancy in the GPS and air pressure altitude readings.
This issue seemed to be something that could be worked around by averaging the two readings which would theoretically provide a single reasonably accurate reading, so long as both readings were not off by too much of a margin. After implementing this change, we once again returned to the test site, ready to continue testing the PSCC.
We started off by once again performing two tests using a cone to indicate if a successful PSCC activation occurred. Surprisingly during both of these tests the PSCC preformed as expected, dropping the cone at the correct altitude. These results were very promising and left us feeling confident that we were ready to preform a full drop test, that would involve the PSCC automatically deploying the parachutes in flight.
From the start the test was plagued with problems. The PTP (Parachute Test Payload), that would drop with the PSCC proved to be very unstable when attached to the FTS, attempting to flip over when in flight. A temporary fix was eventually found in the form of a small weight attached to the nose of the PTP, that shifted it’s center of gravity low enough to regain some stability. Although the PTP was now stable enough to proceed with the test, it still proved challenging to keep balanced while in flight.
The next problem occurred when the FTS reached the drop altitude and the command was sent for the PTP to detach from it, a command that the PTP seemed not to follow. This placed us in a risky situation, as the PSCC, mounted within the PTP, had armed itself when it passed an altitude greater then 200ft and would depoly the parachutes when it next descended below this altitude. This meant that if the PTP failed to detach from the FTS, the parachutes would deploy as the FTS descended to land, possibly causing damage to it. Several attempts were made to cause the PTP to detach from the FTS, inducing the re-sending of the command and a series of sharp maneuvers preformed by the FTS in an attempt to shake the PTP free. This last action proved successful and the PTP detached from the FTS, beginning it’s decent.
The PTP fell away from the FTS, quickly gaining speed as it descended. In only a few moments it reached 200ft, the altitude at which the PSCC was programed to deploy the parachutes. Less then a second later the PTP impacted with the ground. The parachutes had failed to deploy.
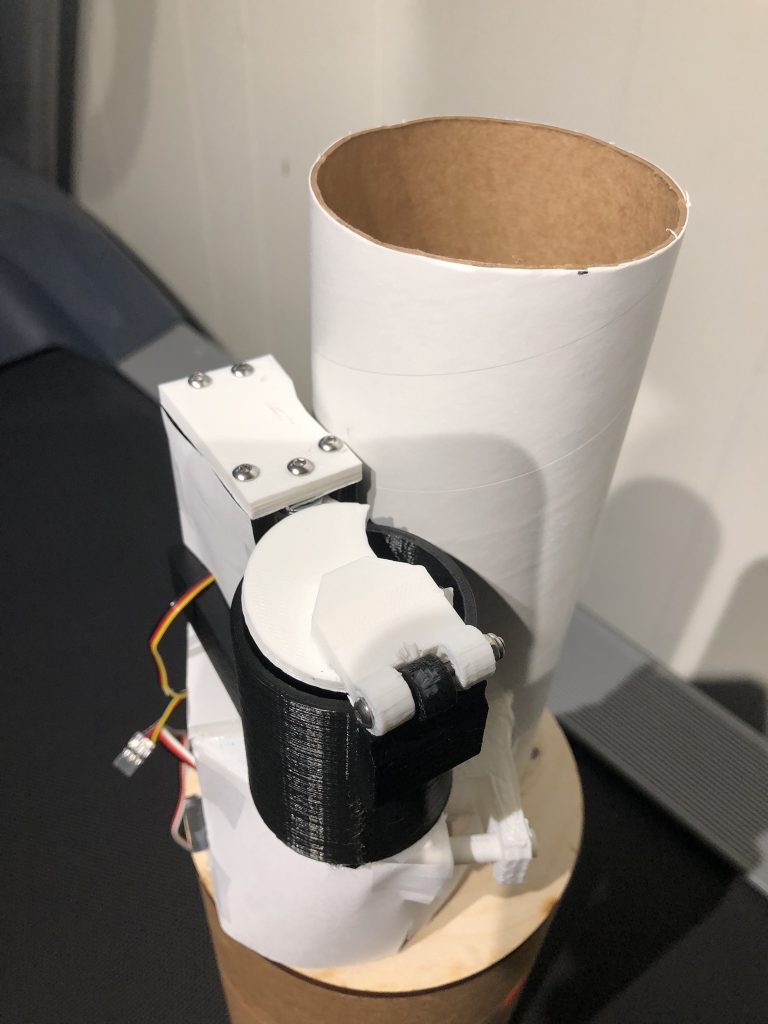
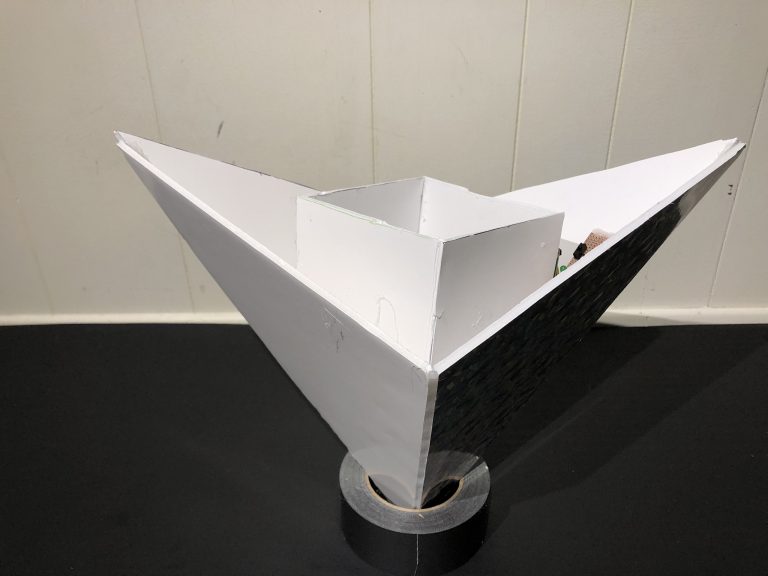
Arriving at the crash site it quickly became apparent that the PTP was damaged beyond repair. The force of the impact had split it’s foam board shell in two and crushed much of the structure. Worse, the force of the crash had completely destroyed the PSCC, leaving the electronics cracked and unusable. The only components of the PTP that escaped damage were the two parachutes and the three batteries that powered it.

An investigation into the cause of the crash was started and almost immediately the cause was found. Once again the GPS and air pressure sensors had reported significantly different values, so different, that even averaging the two numbers could not fix it. This discrepancy (shown in the data below) caused the PSCC to not deploy the parachutes in time.
Time = 17:54:33
GPSAltitude = 60.70
APAltitude = 304.57
AverageAltitude = 182.63
AltitudeDifference = 243.87
TriggerState = 0
Speed (knots)= 5.75
Angle = 123.75This crash has caused a significant set back to the development of the PSCC as we will have to spend time and money, replacing all the components destroyed in the crash.