More Testing
With the Parachute System Control Computer (PSCC-2) fully programed and functioning, we had reached the point where we could perform an immediate drop test. But, there was one more test we wanted to do before we staked the payload and all of it’s electronics on the performance of the PSCC-2.
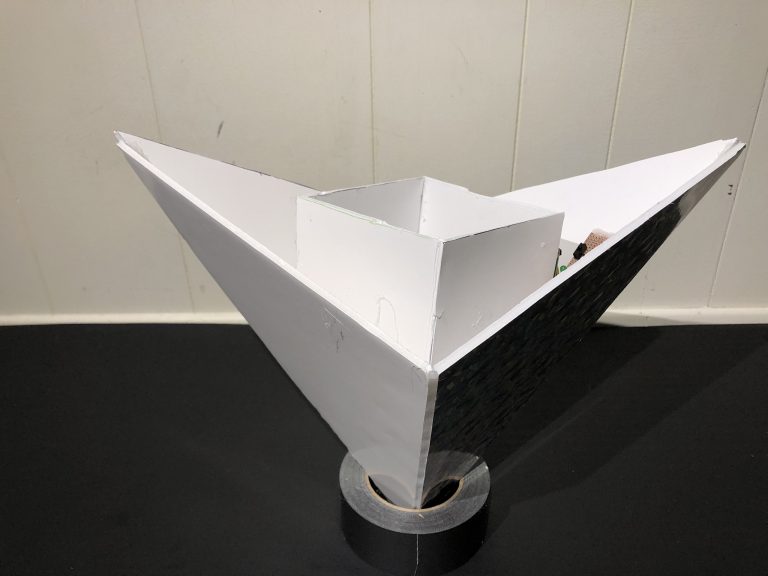
In preparation for the test we packed the PSCC-2 into a simple enclosure that would protect it during the flight. In place of the parachute system, we attached a servo and an orange cone. This cone would simulate the parachute during the flight test; if it was released during the decent, we would know that the PSCC-2 had performed as expected and would have deployed the parachute if it was an actual drop test.

Upon arriving at the test site, we set up the Flight Test System (FTS) and attached the payload to it, and then began testing. Each flight followed the same profile, one that was designed to emulate the conditions that would be experienced during a drop test. The FTS ascended to an altitude of up to 122 m (400 ft) and then swiftly descended. During the decent, the payload was watched closely to see if the indicator cone would be released. During the first few tests the PSCC failed to release the cone, and upon landing the problem was determined to be mostly mechanical in nature. While the PSCC had correctly signaled the servo motor to open, it had only done so partially. Eventually the problem was tracked down to an error in the code that the PSCC-2 was running and was soon resolved.
A set of two tests were run after the fix was implemented, confirming that the issue had been properly resolved. Not only did this success prove that the PSCC-2 was indeed ready for flight, it also gave us the opportunity to gather additional data from the sensors, which will give us further insight into the way it operates. With this task now completed, we can now move on to a full fledged drop test of the PSCC.