Project AVOID Part 1; Startup
Unlike Project Redirect, Project AVOID (Attenuating Vehicular Obstacle Interference Design), formally known as Project X is not focused around the development and operation of a entire vehicle (like a high altitude balloon) but instead, its goal is to design a single system. The system we will be designing is described in the challenge as:
[The] sensor will be the primary mechanism by which the potential rover would detect and navigate[s] through dangerous situations during its operational life. By sensing obstacles such as rocks, crevices, and inclines, the rover would then navigate around the obstruction, enabling the rover to continue to explore the surface of Venus and collect more observational data.
herox.com
While we expect the design process to be similar to that of the Project Redirect Parachute System, it is likely we will encounter some unexpected challenges.
Our first task is to develop a system that can be used to test the AVOID sensors. While the FTS (Flight Test System) is an extremely useful test platform, it is not much use in testing components of a land based rover. We needed to design a land based counterpart for the FTS. Additionally, as the challenge specifies the measurements of the rover that AVOID will be mounted to, we can design the our vehicle to match these measurements.
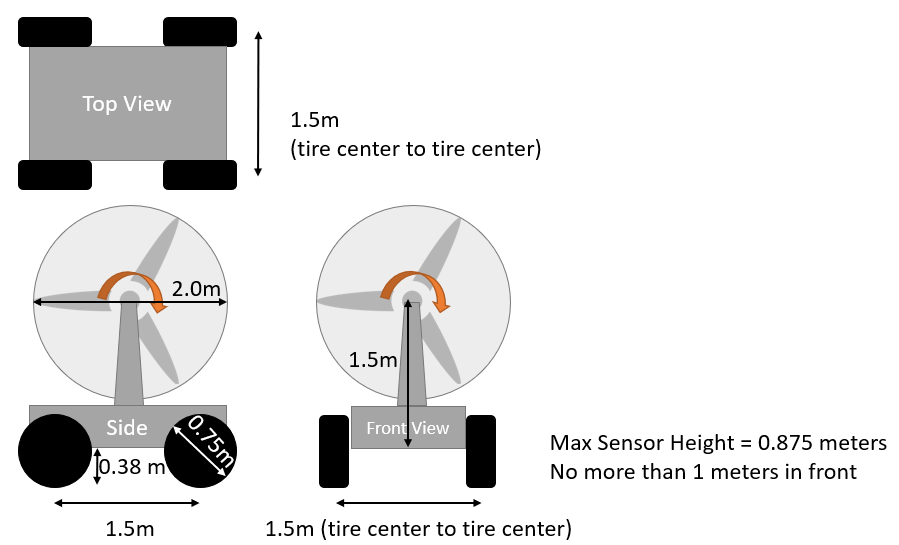
The issue with the presented measurements is that they are far too large for us to feasibly create a full scale test system. So instead, we decided to create a 1/2 scale system. This will keep the it inexpensive and easy to build while still retaining an accurate scale. The next step was to acquire a suitable test system. Fortunately, we already had a good platform to start with.

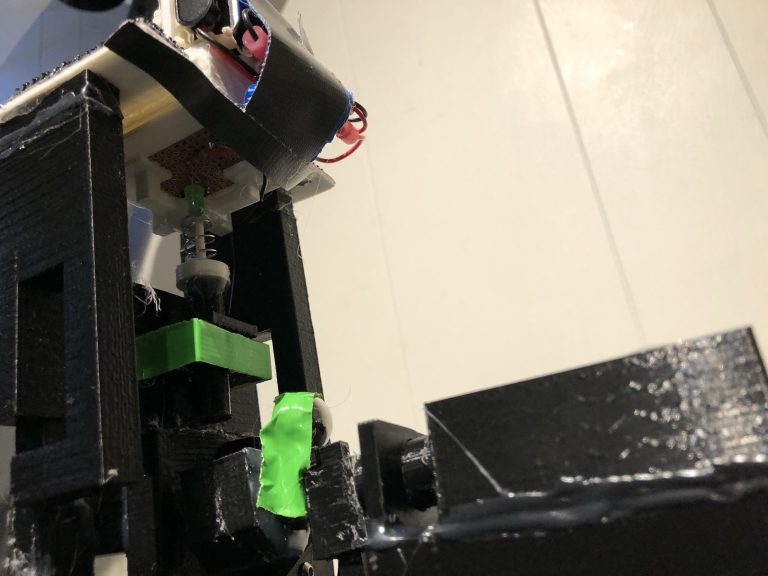
Pictured above is a remote controlled crawler. The more powerful version of an RC car, a crawler is built to drive off-road, often over rocks and other extreme terrain. These capabilities, combined with its size, make it the perfect candidate for our test system. But before we can begin testing, we needed to make some upgrades. While the crawler is almost the necessary size, we need a way to easily mount sensors to the front of it. To achieve this, we fabricated an adapter that allowed us to attach a 30cm (12in) metal plate. The challenge requires the sensors to depress a small pin to alert the rover of hazards. To test if the sensors would be able to depress this pin, we attached a small circuit with an LED to the front of the GTS (Ground Test System). The illumination of this LED would signal that the sensor had successfully depressed the pin.

Now that we have a GTS we can start development of the AVOID sensors.