Project AVOID Part 2; Rocks
With the GTP (Ground Test Payload) completed and ready for use, we can now start with the development of the AVOID (Attenuating Vehicular Obstacle Interference Design) sensors. Fortunately, the challenge presents a list of hazards that the sensors must detect:
- Slopes greater than 30 degrees (either up or down hill)
- Rocks greater than 0.35 meters in height
- Holes/valleys greater than 0.35 meters deep, except for small holes which would not entrap the wheels.
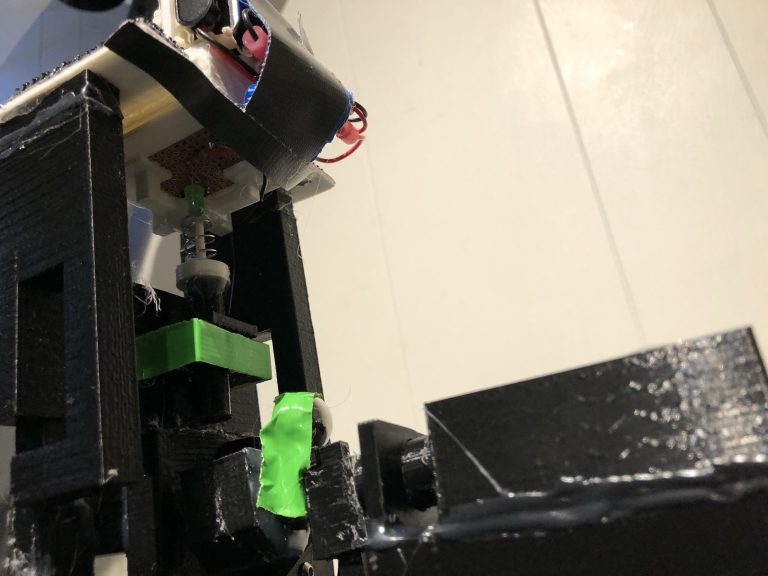
After consulting this list, we selected the 2nd hazard to start with. We considered several different sensors that would be capable of detecting such hazards, ranging from sonar to antenna. Eventually we settled on a simple bumper that would extend from the front of the rover and when the bumper came into contact with an obstacle it would alert the rover. While selecting a simpler method of hazard avoidance does make the design and testing processes much easier, the main benefit of selecting a simple design is the inherent robustness of such a system, caused by the low number of parts. This robustness is beneficial when operating in a hostile environment such as the one found on Venus.
We chose to use similar materials to those used in the construction of the GTS (Ground Test System), along with a 3D printed shock system to construct this bumper. After assembly was completed we mounted it on the GTS and were ready to test it.
This successful test marks the completion of the design of the rock avoidance sensor. With one done, we can now move on to the next hazard.