The Cameras of Project Redirect
When we flew the FTS (Flight Test System) for the first time, we recorded the flight from the ground. While this was sufficient for recording that flight, we need more cameras to record footage from different view points during the next test. This footage is necessary to gauge the performance of the system that is being tested. There are two main camera systems that will be used in our next test. A small, downwards facing camera on the FTS and a camera housed in the nose of the test payload. When combined with the footage from the ground, we will have a total of 3 different views of the test.
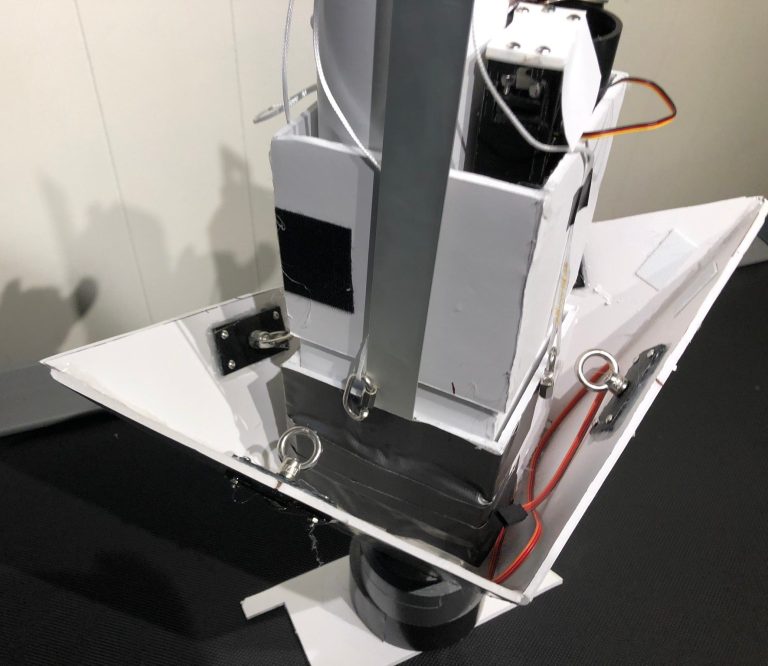
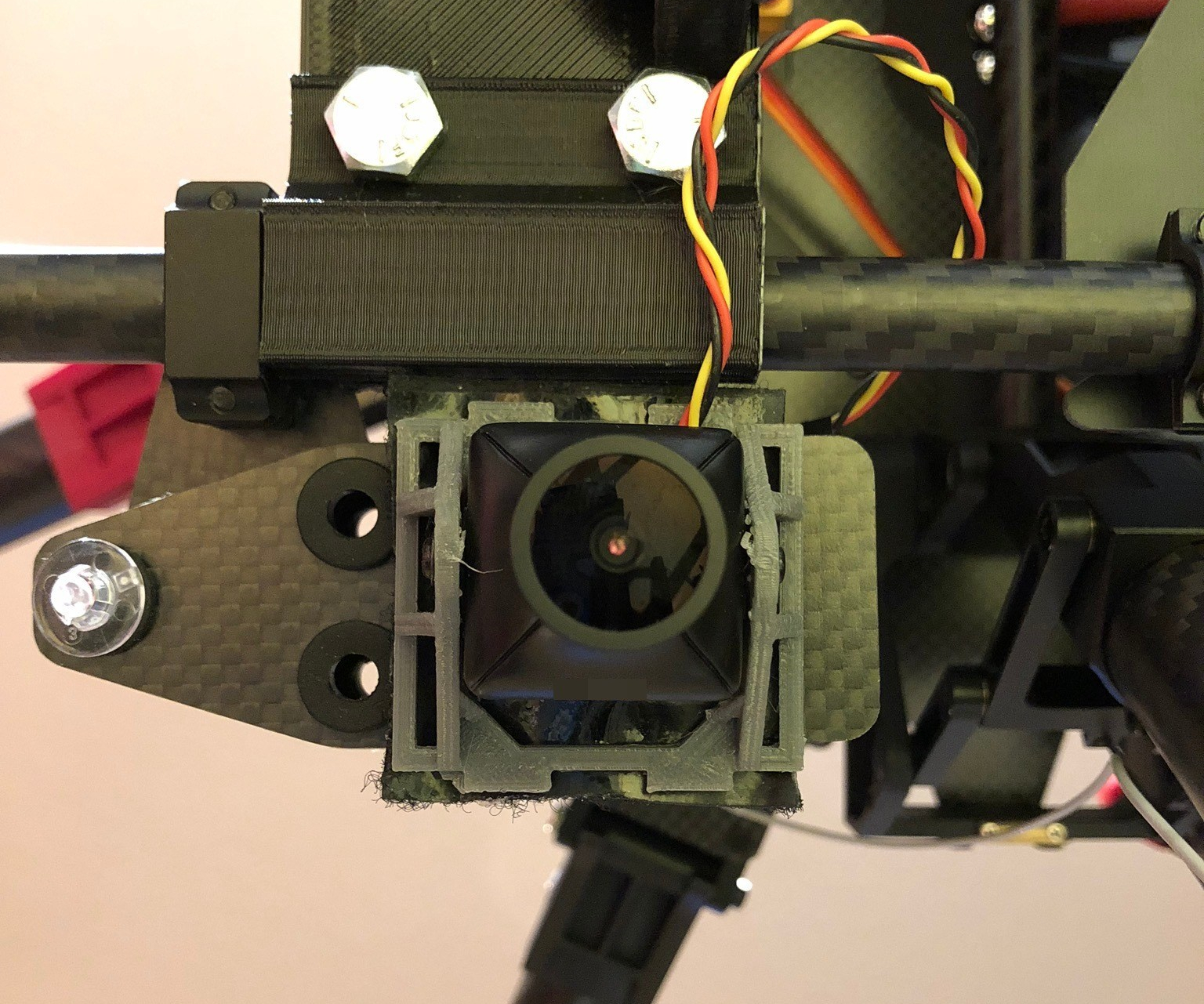
The FTS camera not only records, it also streams live video to the ground allowing the operator of the FTS to see what it sees. After the FTS drops the test payload, it will hover and use this camera to record the descent of the test payload from above. The FTS camera is already mounted to the FTS and it was able to live stream during our last flight. We only need to set up it’s recording function and it will be ready for it’s next flight.
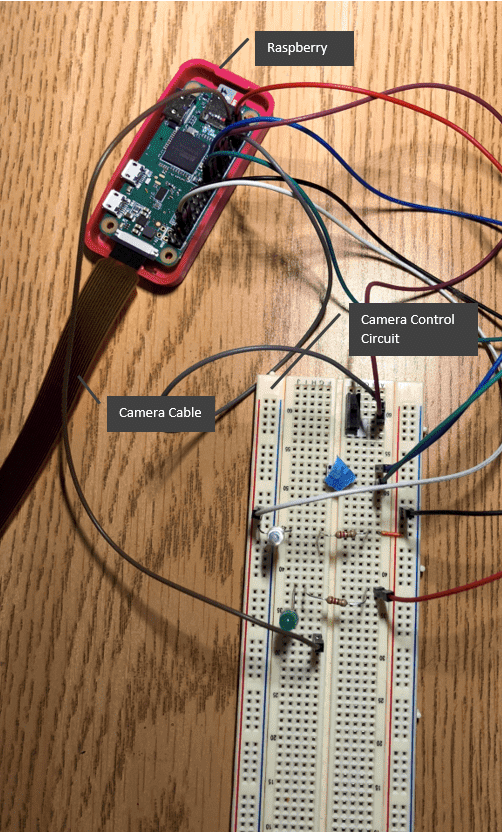
The test payload will house a Raspberry Pi and camera. This camera will record the flight from the point of view of the payload. A few weeks ago, we finished developing the software that controls this camera. Currently, we have a prototype of the camera’s control circuit on a breadboard. The prototype allowed us to easily modify and test the circuit. However, this prototype is too large to mount on the test payload. After all the necessary parts arrive, we will begin construction of a smaller camera control circuit.