Altimeter
In the past few weeks we have made significant progress with both the GTP (Guidance Test Payload) and PSCC (Parachute System Control Computer). This continues to bring us closer to the first test flight of the GTP.
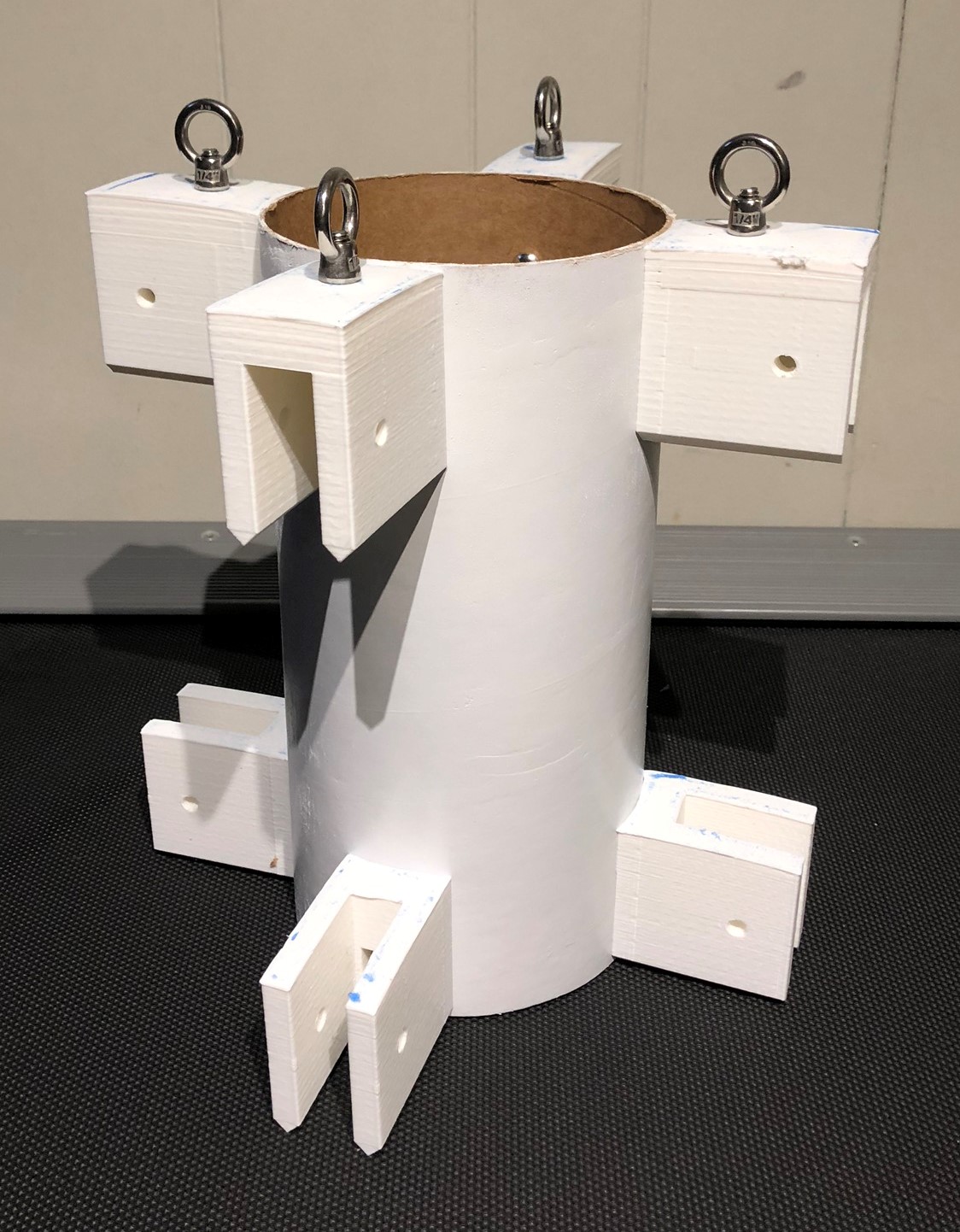
With the arrival of new 3D printing material (filament) we were able to print the rest of the fin attachment points. We then mounted both sets of attachment points on the parachute segment shell. Now that we had attachment points, we could fabricate and attach the fins as well.
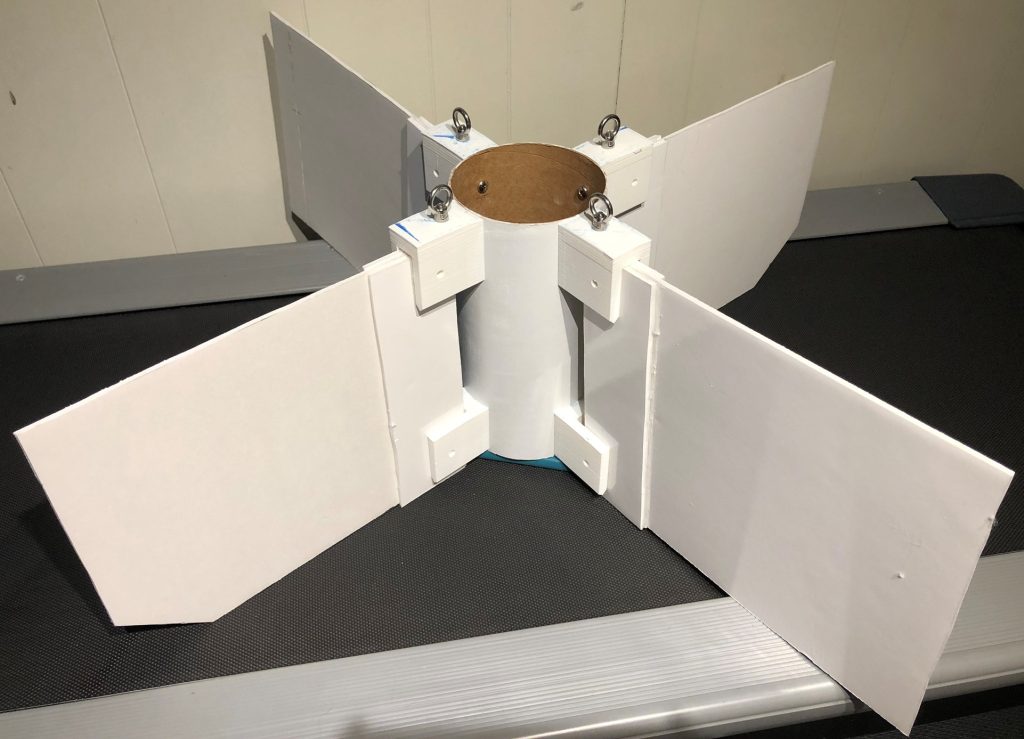
With the fins now attached to the shell, all that remains to be done is the set up of the servo motors that will actuate the fins’ control surfaces. At this time, we also painted the electronics’ segment shell.
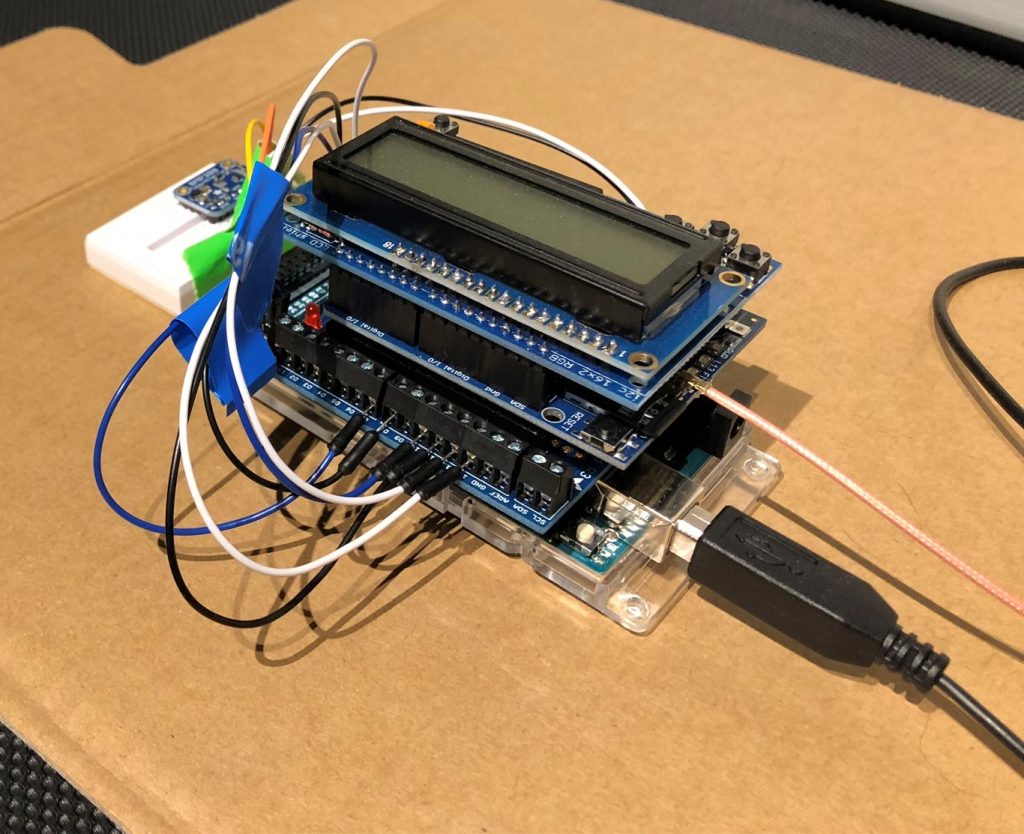
Soon after we finished painting the shell, the parts for the PSCC arrived and we spent the following week assembling and programing it. Currently, the PSCC consists of an Arduino (a type of small microcontroller), three shields (boards that can be mounted on an Arduino to add additional functionality) and an external barometric sensor. These components give the PSCC the ability to record GPS and barometric altitude data and then both display the data on a LCD screen and save it to an internal micro SD card for later analysis. While eventually we will use the PSCC to automatically deploy the GTP’s parachute at a preset altitude, first we must perform several tests to determine the accuracy and reliability of the system. The first step of this process is to use the FTS (Flight Test System) to carry the PSCC to different altitudes and gather sensor readings that will be used to determine the accuracy of the system.
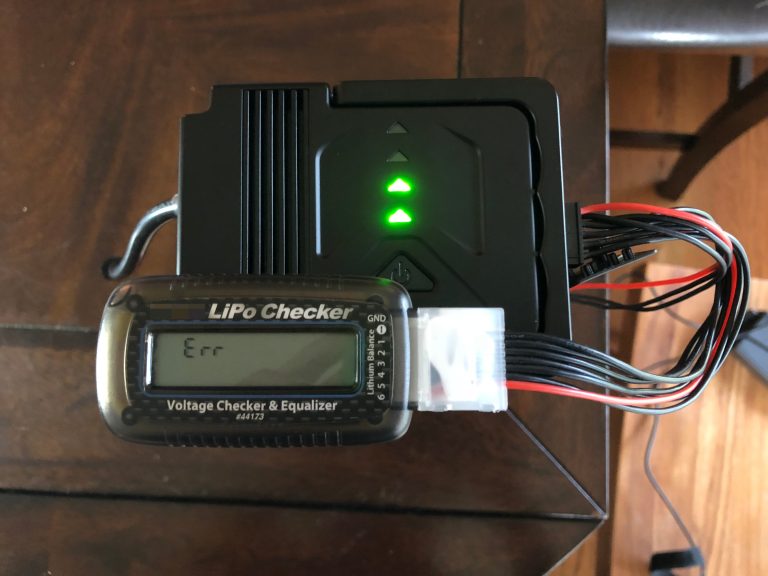
On the 19 of December, we traveled to the test site with the FTS and a fully charged battery. Although the weather was good, the flight did not go as expected. During our first flight, the FTS battery reported critically low power only minutes after takeoff, forcing us to cut our flight short. After landing, we tested the battery and found that it read almost full power. We troubleshooted the issue and then attempted another flight. This time we were able to reach a higher altitude before the battery again begin to prematurely read critically low voltage. At this point we decided to not risk further flights before investigating the battery issue more thoroughly. Fortunately, this second flight did recover some usable altitude data.
After leaving the test site we were able to analyze the data that the PSCC recorded during the flight. The graph below shows the GPS and barometric data gathered during this flight (displayed in gray and orange respectively).

The analysis quickly revealed two problems, first the GPS on the PSCC was reading an altitude value that was higher then the value the barometric sensor had recorded and second, the altitude value from the GPS did not change throughout the flight. This suggests that the barometric reading could be somewhat inaccurate and the GPS is either not recording or not logging the needed altitude data. We will have to fix these issues with the FTS battery and PSCC before we can test again.